
Роботизированная линия для обработки анодных листов
Когда слышишь ?роботизированная линия для обработки анодных листов?, многие сразу представляют пару манипуляторов, которые берут и кладут плиты. На деле же — это целый технологический комплекс, где робот часто становится самым ?простым? звеном. Основная головная боль — обеспечить точность позиционирования, синхронизацию с грузоподъемным оборудованием и, что критично, стабильность в условиях цеха: вибрация, пыль, перепады температур. Самый частый промах при проектировании — недооценка именно этих ?мелочей?, из-за которых линия потом месяцами доводится до ума на объекте.
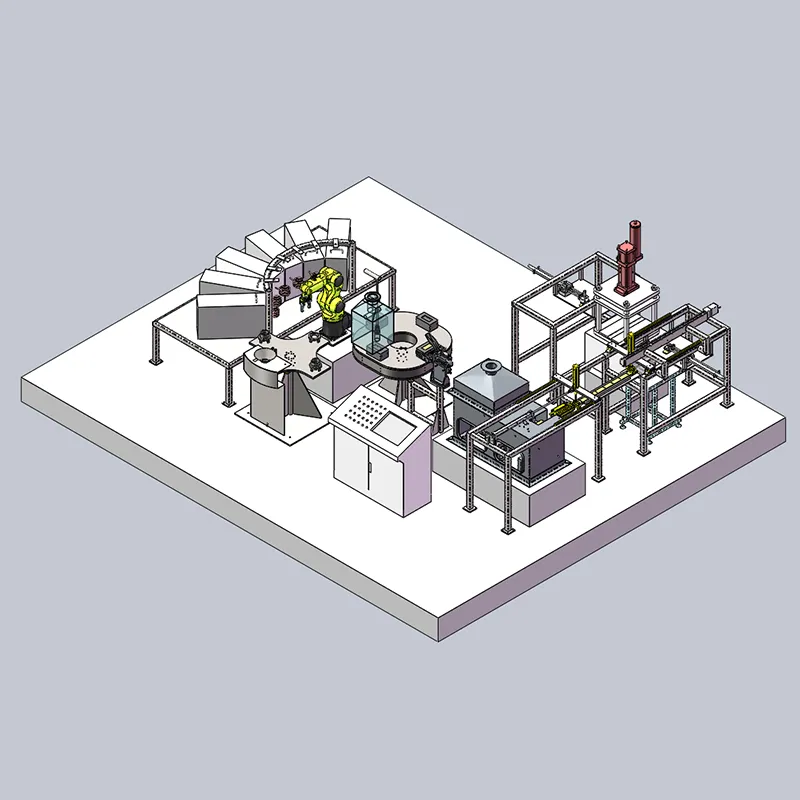
Из чего на самом деле складывается линия
Если разбирать по косточкам, то ключевых узлов несколько. Во-первых, система подачи и ориентации анодных листов. Тут часто используют рольганги с выравнивающими устройствами, но если листы деформированы (а они почти всегда с небольшим короблением после литья), простой транспортер не справится. Приходится ставить промежуточный участок с прижимными роликами или даже систему оптического контроля геометрии, чтобы робот понимал, как именно брать конкретную плиту.
Во-вторых, сам роботизированный комплекс. Тут выбор между шарнирными и портальными системами. Для тяжелых анодов часто идут на портальные решения — жестче, грузоподъемность выше. Но если нужно не просто переложить, а, допустим, развернуть лист для обработки кромки, то шарнирный робот с соответствующим захватом может быть гибче. Захват — отдельная история. Вакуумные плиты хороши для ровных поверхностей, но если на аноде есть остатки электролита или неровности, лучше механические лапки с адаптивным хватом.
И третий, часто невидимый, но самый важный блок — система управления. Она должна не просто отдавать команды роботу, а в реальном времени получать данные от датчиков веса, сканеров положения, согласовывать работу с тельфером или кран-балкой. Именно здесь чаще всего возникают сбои. Помню случай на одном из заводов, где из-за задержки сигнала от датчика на рольганге робот пытался взять лист, который еще не дошел до точки захвата. Результат — сломанные пальцы захвата и простой на сутки.
Практические сложности и ?подводные камни?
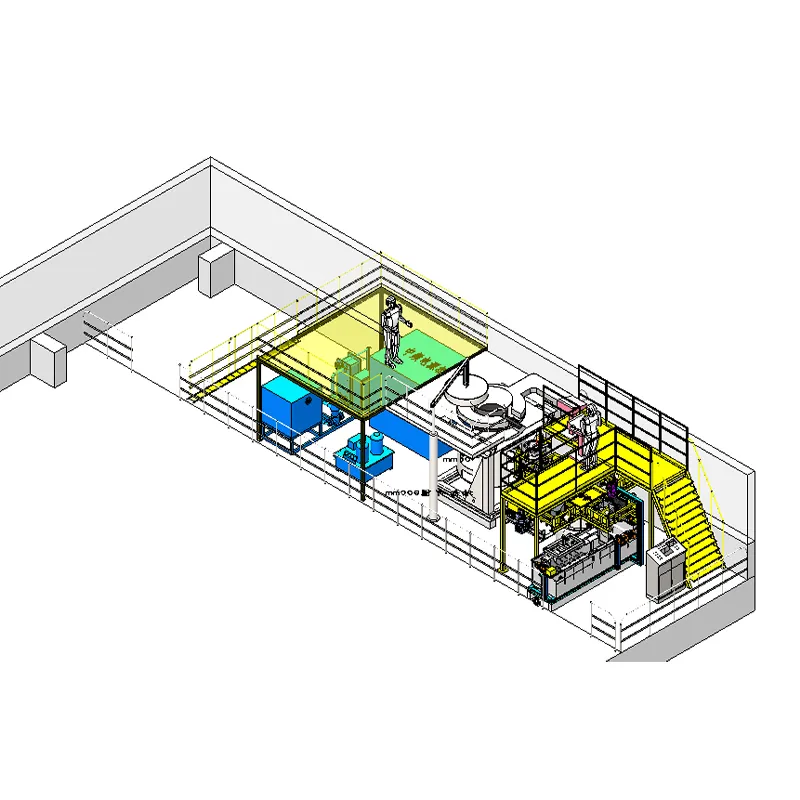
Теория — это одно, а запуск в ?полевых условиях? — совсем другое. Одна из главных проблем — совместимость с существующей инфраструктурой цеха. Часто заказчик хочет встроить роботизированную линию в действующий поток, не останавливая производство. Это как менять колесо на движущейся машине. Приходится делать сложные этапные пусконаладочные работы, иногда ночью или в технологические ?окна?.
Еще один момент — персонал. Операторы и слесари, привыкшие работать вручную, поначалу относятся к роботу с недоверием. Важно не просто поставить ограждение, а продумать логику работы так, чтобы человек мог легко и безопасно вмешаться в процесс, скажем, при сбое. Интерфейс управления должен быть интуитивным, а не требовать изучения толстого мануала.
И конечно, расходные материалы и обслуживание. Те же вакуумные присоски изнашиваются, особенно при контакте с горячими или шероховатыми анодами. Нужно предусмотреть легкий доступ для их замены, а лучше — иметь систему мониторинга разрежения, которая заранее предупредит о падении эффективности. Без этого можно получить падение листа на конвейер, что чревато не только повреждением продукции, но и серьезной аварией.
Кейс: интеграция в действующее литьевое отделение
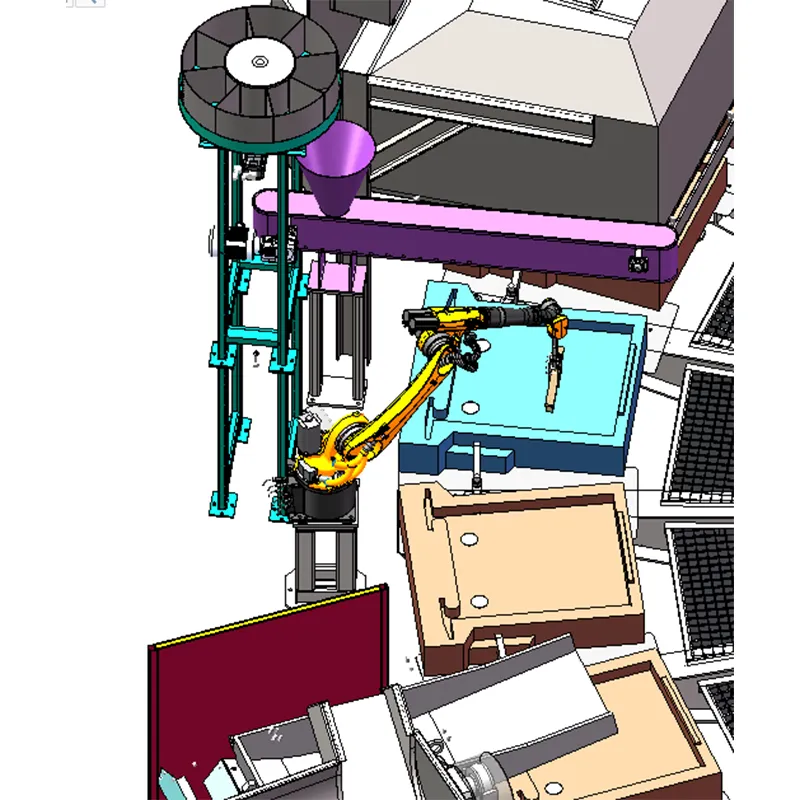
Был у нас проект, где нужно было автоматизировать съем и укладку анодов после машины литья под давлением. Заказчик — крупный завод цветмета — изначально смотрел на европейских поставщиков, но их решения были слишком ?стерильными?, рассчитанными на идеальные условия. Наше предложение строилось вокруг гибкой портальной системы с дублирующим механическим захватом от компании ООО ?Ганьчжоу Цзиньхуань Заливочное Оборудование?. Они как раз имеют серьезный опыт в автоматизированном оборудовании для разливки, и их инженеры предложили использовать комбинированный захват: вакуум для основной плоскости и механические фиксаторы по краям на случай сбоя.
Основная сложность была в температуре. Аноды выходили с температурой около 80-90°C. Стандартные резиновые присоски быстро деградировали. Вместе со специалистами из ООО ?Ганьчжоу Цзиньхуань? подобрали термостойкий полимерный состав для уплотнителей и доработали систему охлаждения самого захвата. Это не было прописано в изначальном ТЗ, но без такого решения линия бы не работала стабильно.
Еще один важный нюанс — программная логика. Из-за остаточного напряжения в металле некоторые листы после съема с формы слегка ?пружинили?. Робот, фиксируя положение по краям, мог немного деформировать лист. Пришлось ввести в алгоритм дополнительную проверку по датчику усилия и корректировку траектории. На сайте jhcast.ru можно увидеть, что компания делает акцент на интеллектуальное оборудование — и это как раз тот случай, когда ?интеллект? заключается не в сложном ИИ, а в правильно написанных и отлаженных алгоритмах обработки сигналов с датчиков.
Ошибки, которых стоит избегать
Глядя на наш и чужие проекты, можно выделить несколько типичных ошибок. Первая — попытка сэкономить на системе безопасности. Ставят легкие ограждения, которые вибрируют, или дешевые световые завесы, срабатывающие от цеховой пыли. Это прямой путь к травмам и простоям. Безопасность должна быть избыточной.
Вторая — игнорирование этапа предпроектного обследования. Недостаточно просто знать габариты анодов и циклограмму. Нужно замерять уровень вибраций пола, перепады температур в течение смены, качество сжатого воздуха (оно в цехах часто оставляет желать лучшего). Без этих данных любой проект строится на песке.
И третье — отсутствие плана техобслуживания. Линию сдают, обучают двух операторов и забывают. А потом через полгода выходит из строя редуктор позиционера из-за отсутствия смазки, которую по регламенту нужно было менять ежемесячно. Хороший поставщик, такой как ООО ?Ганьчжоу Цзиньхуань Заливочное Оборудование?, всегда сопровождает проект не только гарантией, но и четким регламентом обслуживания, а часто и удаленным мониторингом ключевых параметров.
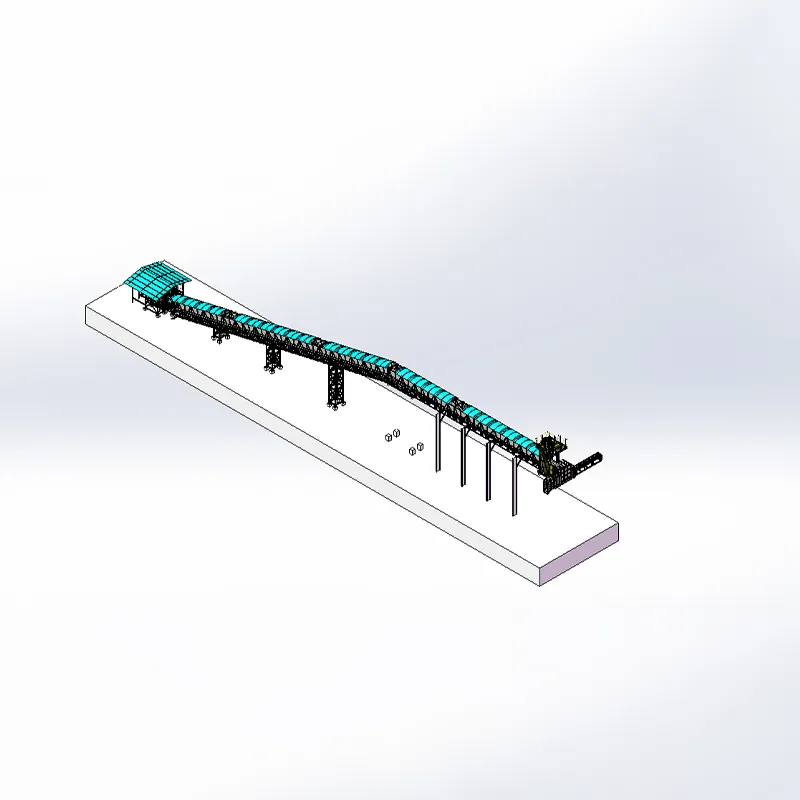
Взгляд в будущее: что еще можно автоматизировать?
Собственно, обработка анодных листов — часто только первый шаг. За роботизированной укладкой логично следует автоматизация транспортировки пачек на склад, их учет с помощью RFID-меток. Но более интересное направление — это встраивание роботизированной линии в единый контур с контролем качества. Например, установка лазерного сканера прямо на портал робота для измерения геометрии каждого анода и автоматического бракования дефектных листов еще до отправки на склад.
Еще одна точка роста — предиктивная аналитика. Накапливая данные о времени цикла, усилиях захвата, температуре компонентов, можно предсказывать необходимость замены расходников или приближающийся отказ подшипникового узла. Это уже не просто автоматизация физического труда, а переход к цифровому двойнику технологической операции.
В итоге, возвращаясь к началу, роботизированная линия для обработки анодных листов — это не ?коробка с роботом?. Это сложносочиненный организм, успех которого зависит от глубокого понимания технологии, внимания к деталям и готовности решать нестандартные задачи прямо на площадке. И именно практический опыт, а не красивые презентации, становится главным критерием при выборе партнера для таких проектов.
Соответствующая продукция
Соответствующая продукция


Самые продаваемые продукты
Самые продаваемые продукты-
 Полностью автоматическая литьевая машина для золотых слитков
Полностью автоматическая литьевая машина для золотых слитков -
 Комбинированная машина для мойки и сушки электролитического серебряного порошка
Комбинированная машина для мойки и сушки электролитического серебряного порошка -
 Дисковая вертикальная литьевая машина для серебряных анодных пластин 17 кг
Дисковая вертикальная литьевая машина для серебряных анодных пластин 17 кг -
 Система плавки и литья с низким давлением кислорода (сплав серебро-медь-цинк)
Система плавки и литья с низким давлением кислорода (сплав серебро-медь-цинк) -
 Линейная литьевая машина для серебряных слитков 15 кг
Линейная литьевая машина для серебряных слитков 15 кг -
 Автоматическая машина для дозированного литья никеля
Автоматическая машина для дозированного литья никеля -
 Дисковая вертикальная литьевая машина для серебряных анодных пластин 45 кг (полностью автоматическая)
Дисковая вертикальная литьевая машина для серебряных анодных пластин 45 кг (полностью автоматическая) -
 Литниковая установка с медными изложницами
Литниковая установка с медными изложницами -
 Штабельная загрузочная машина для анодных остатков
Штабельная загрузочная машина для анодных остатков -
 Автоматическая машина для литья под двумя дисками с двумя ковшами и дозированной разливкой
Автоматическая машина для литья под двумя дисками с двумя ковшами и дозированной разливкой -
 Автоматическое устройство для нанесения сульфата бария
Автоматическое устройство для нанесения сульфата бария -
 Система грануляции серебряных капель
Система грануляции серебряных капель
Связанный поиск
Связанный поиск- Вакуумная деаэрационная установка
- транспортер горизонтальный скребковый
- Линейная литьевая машина для серебряных слитков
- Автоматическое устройство для выбивки изложниц с ПЛК управлением
- Вакуумная транспортная система
- печи средней частоты
- Комплектная производственная линия для металлургического завода
- Специализированное нестандартное оборудование индивидуального исполнения
- индукционная печь средней частоты
- Технология электролитического рафинирования



