
Роботизированный комплекс для отрыва катодных листов меди
Когда слышишь про роботизированный комплекс для отрыва катодных листов меди, многие сразу представляют себе стандартную руку-манипулятор, которая тупо снимает готовые листы. На деле же — это головная боль, где механика, алгоритмы и понимание самого процесса электролиза сходятся в одной точке. Если один из элементов хромает, вся система превращается в дорогую игрушку, а не в решение. Сразу скажу, что идеального ?коробочного? решения нет, каждый проект — это адаптация, а иногда и борьба с нюансами конкретного производства.
От идеи до первой царапины на меди
Начну с базового, но часто упускаемого из виду момента: сам катодный лист. Он не идеален. После электролиза поверхность может иметь наплывы, так называемые ?древовидные? или дендритные образования по краям, да и кривизна бывает разной. Робот, который должен его захватить и аккуратно оторвать от постоянных катодных штанг, не может работать по жестко заданной траектории. Нужна система обратной связи — обычно на основе датчиков усилия и зрения. Но и здесь подводные камни: цех электролиза — агрессивная среда, пар, брызги электролита, которые ?забивают? оптику. Приходится искать компромисс между точностью и живучестью системы.
В одном из ранних наших проектов мы сделали ставку на высокоточные лазерные сканеры для построения 3D-карты листа перед захватом. Технологически — красиво. Практически — через две недели работы в цехе линзы покрылись тончайшей пленкой из кислотных паров, и точность позиционирования упала на 40%. Пришлось срочно разрабатывать систему продувки и защиты, что удорожило проект. Это был урок: в металлургии, особенно цветной, надежность и стойкость к среде часто важнее ?цифровой? изощренности.
Тут стоит упомянуть компании, которые глубоко погружены в контекст именно металлургического оборудования. Например, ООО ?Ганьчжоу Цзиньхуань Заливочное Оборудование? (их сайт — jhcast.ru). Они специализируются на высокотехнологичном оборудовании для цветной металлургии, включая автоматизированные системы разливки. Хотя их профиль — несколько иная ?ниша? (заливочное и разливочное оборудование), но такой бэкграунд критически важен. Потому что они изначально понимают физику процессов, среду цеха, требования к надежности. Это не сторонние интеграторы, которые робота купили и привезли. Их подход к разработке, как я понимаю, строится на владении ключевыми технологиями для всей цепочки. Когда смотришь на их портфель — интеллектуальное оборудование для разливки, — видно, что логика похожа: не просто механизировать, а встроить интеллект, который компенсирует неидеальность реального производства.
Ключевой узел: захват и усилие отрыва
Сердце комплекса — захватное устройство. Вакуумные присоски? Не всегда. Медь — металл тяжелый, лист большой, поверхность может быть не абсолютно ровной. Вакуум может сорваться. Чаще используют комбинированный захват: механические ?пальцы? или лапки, которые заводятся под край листа, плюс вакуумная подушка для прижима и стабилизации. Самое сложное — рассчитать и реализовать усилие отрыва. Слишком слабо — лист не отделится от штанги, робот будет простаивать в холостом ходе. Слишком сильно — деформируешь край листа или, что хуже, сорвешь его с ?пяток? крепления, получив брак и риск падения заготовки.
Алгоритм здесь часто итеративный. Мы настраивали его на стенде, а потом неделями ?танцевали? в цехе, записывая данные с датчиков усилия для разных партий катодов. Выяснилось, что усилие отрыва зависит от температуры электролита, времени нахождения катода в ванне, даже от состава анодов. Пришлось вводить поправочные коэффициенты, которые оператор может грубо задавать через HMI. Не идеально, но работает.
Именно в таких нюансах видна разница между теоретической автоматизацией и практической. Компания, которая делает ставку на исследование технологий и их внедрение, как та же ООО ?Ганьчжоу Цзиньхуань Заливочное Оборудование?, наверняка сталкивалась с подобными проблемами в своих системах разливки. Там тоже критичен контроль усилий, температур, позиционирования в реальном времени. Этот опыт бесценен и для смежных задач, вроде нашего комплекса.
Интеграция в линию: где рождаются проблемы
Сам по себе робот — лишь часть системы. Его нужно вписать в существующую линию транспортировки катодных рамок. Часто это старая инфраструктура, с люфтами, неидеальной подачей. Роботизированный комплекс должен это компенсировать. Мы использовали дополнительную систему технического зрения для позиционирования самой рамы на конвейере перед подходом к роботу. Но и тут — освещение в цехе меняется в зависимости от времени суток, пыль, пар. Пришлось переходить на камеры с более широким динамическим диапазоном и постоянно обновлять эталонные образцы в памяти системы.
Еще один момент — цикл работы. Линия не должна простаивать. Если робот по какой-то причине (например, не распознал лист) пропускает цикл, это создает ?пробку?. Поэтому параллельно с основным алгоритмом мы заложили упрощенный режим ?на отказ?: если за три попытки лист не взят, комплекс дает сигнал на отвод рамы в ручной пост, а сам переходит к следующей. Потери производительности минимальны, но это требует четкой синхронизации с верхнеуровневой SCADA-системой цеха.
Внедрение и распространение таких решений, как у компании с сайта jhcast.ru, наверняка строится на подобной философии: не продать железо, а встроить работающее звено в живую технологическую цепь. Их акцент на внедрении и распространении говорит о том, что они сопровождают проект до его стабильной работы, а не бросают после отгрузки.
Программная начинка и человеческий фактор
Пульт управления. Интерфейс. Для оператора, который может быть далек от робототехники, это должно быть просто: зеленый — работает, желтый — предупреждение, красный — останов. Но для технолога или механика нужен глубокий доступ к параметрам, логам, данным с датчиков. Мы делали двухуровневый интерфейс. Самое сложное — убедить обслуживающий персонал им пользоваться, а не бить по корпусу, когда что-то идет не так. Проводили десятки часов обучения на месте.
Программное обеспечение должно быть устойчивым к сбоям в сети (в цехах бывают скачки напряжения), уметь сохранять и восстанавливать состояние после включения. Мы однажды потеряли калибровочные данные после внезапного отключения электричества — с тех пор все критичные параметры пишутся в энергонезависимую память сразу.
Здесь как раз важна разработка, которая идет от понимания полного цикла. Если компания, как ООО ?Ганьчжоу Цзиньхуань Заливочное Оборудование?, сама разрабатывает и производит продукцию, то она контролирует и ?железо?, и софт. Это дает большую гибкость в доработках под конкретного заказчика и в оперативном исправлении выявленных косяков.
Экономика и что в итоге получает завод
Внедрение роботизированного комплекса для отрыва катодных листов меди — это не про сиюминутную выгоду. Это про снижение влияния человеческого фактора (усталость, травмы), про стабильность цикла, про сбор данных для анализа качества. Основная экономия — не на сокращении двух рабочих мест, а на уменьшении брака (не порванные листы), на повышении общей доступности линии (меньше простоев из-за ручного вмешательства) и, что важно, на безопасности.
На одном из объектов после выхода на проектную мощность удалось увеличить скорость съема листов на 15% без потери качества. Но главное — технолог получил в руки цифры: гистограммы усилий отрыва по партиям, которые стали индикатором проблем в самом процессе электролиза (например, загрязнение электролита). Робот стал не только исполнителем, но и датчиком.
В итоге, возвращаясь к началу. Такой комплекс — это всегда штучный, адаптивный продукт. Успех зависит от того, насколько глубоко разработчик погружен в технологию металлургического производства, а не только в робототехнику. Опыт компаний, которые, подобно ООО ?Ганьчжоу Цзиньхуань Заливочное Оборудование?, фокусируются на исследовании, разработке и внедрении высокотехнологичного оборудования для цветной металлургии, здесь оказывается ключевым. Потому что они знают среду изнутри. И именно такой подход превращает набор механизмов и контроллеров в работающий, надежный роботизированный комплекс, который ежедневно выполняет свою тяжелую работу в цеху.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Система дутья для конвертера
Система дутья для конвертера -
 Загрузочная машина для анодной печи
Загрузочная машина для анодной печи -
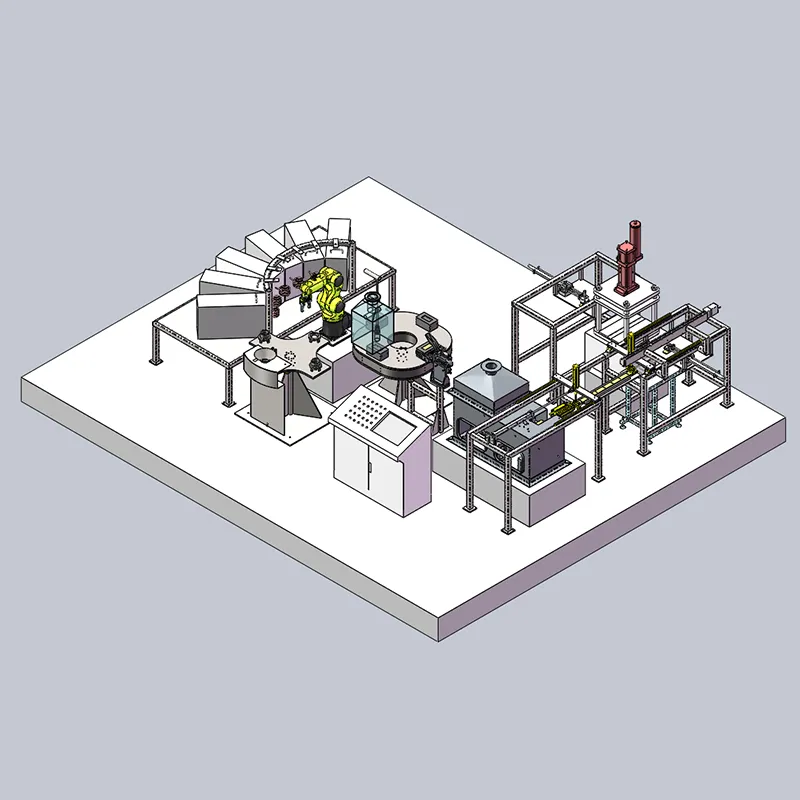
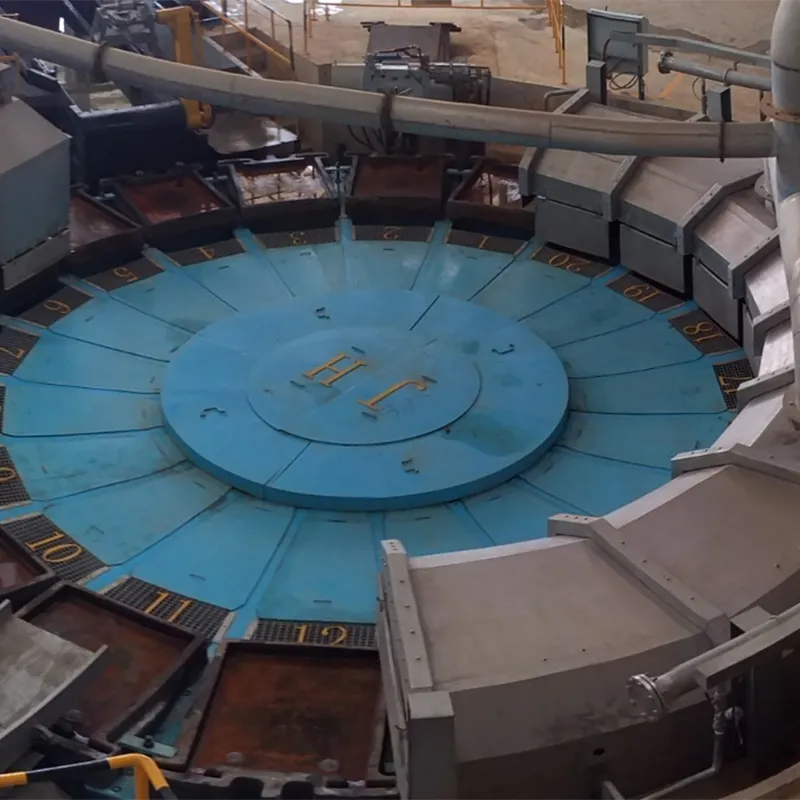
 Роботизированный комплекс для съема катодной меди
Роботизированный комплекс для съема катодной меди -
 Линейная литьевая машина для серебряных слитков 15 кг
Линейная литьевая машина для серебряных слитков 15 кг -
 Полностью автоматическая литьевая машина для золотых слитков
Полностью автоматическая литьевая машина для золотых слитков -
 Автоматическая машина для литья под одним диском с одним ковшом и дозированной разливкой
Автоматическая машина для литья под одним диском с одним ковшом и дозированной разливкой -
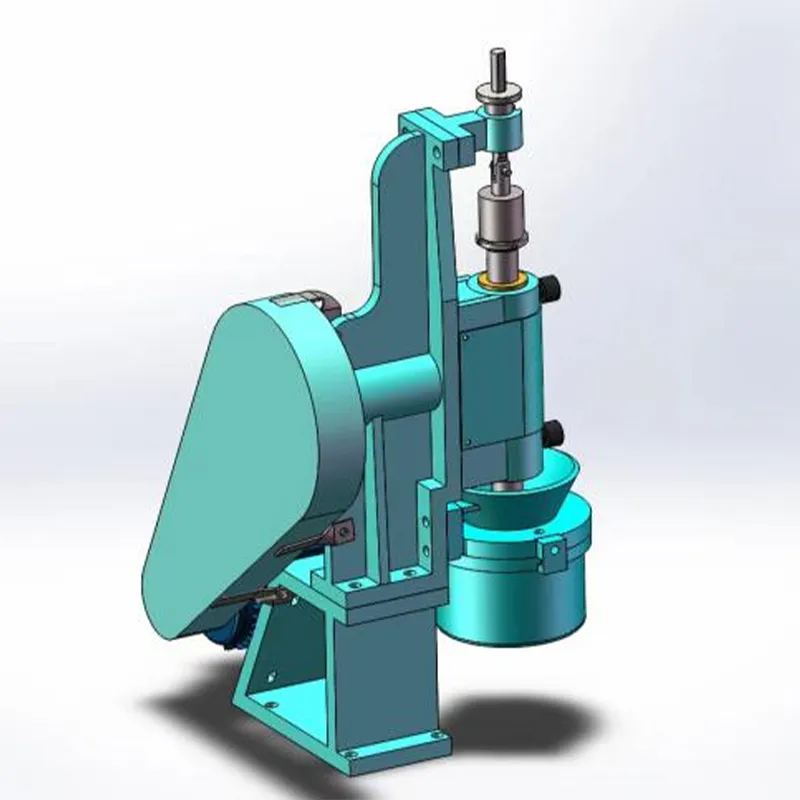 Промышленный шлифовальный станок
Промышленный шлифовальный станок -
 Автоматическая машина для литья под двумя дисками с двумя ковшами и дозированной разливкой
Автоматическая машина для литья под двумя дисками с двумя ковшами и дозированной разливкой -
 Линейная литьевая машина для серебряных слитков 30 кг
Линейная литьевая машина для серебряных слитков 30 кг -
 Дисковая вертикальная литьевая машина для серебряных слитков 15 кг
Дисковая вертикальная литьевая машина для серебряных слитков 15 кг -
 Линейная литьевая машина для серебряных анодных пластин 45 кг
Линейная литьевая машина для серебряных анодных пластин 45 кг -
 Автоматическая машина для чистки свинцовых анодных пластин
Автоматическая машина для чистки свинцовых анодных пластин
Связанный поиск
Связанный поиск- Вертикальная литьевая машина
- Плавильная печь для учебных целей
- Автоматический паллетизирующий робот
- Установка для дозированной разливки никелевых анодных листов
- Система литья с низким давлением кислорода
- Экологичная интегрированная система очистки дымовых газов
- Система непрерывной рафинирования металла
- Автоматическая щелевая очистная машина решетчатого типа для анодов
- Комбинированная машина для мойки и сушки электролитического серебряного порошка
- Автоматическая машина для литья дисков из серебряных слитков



